
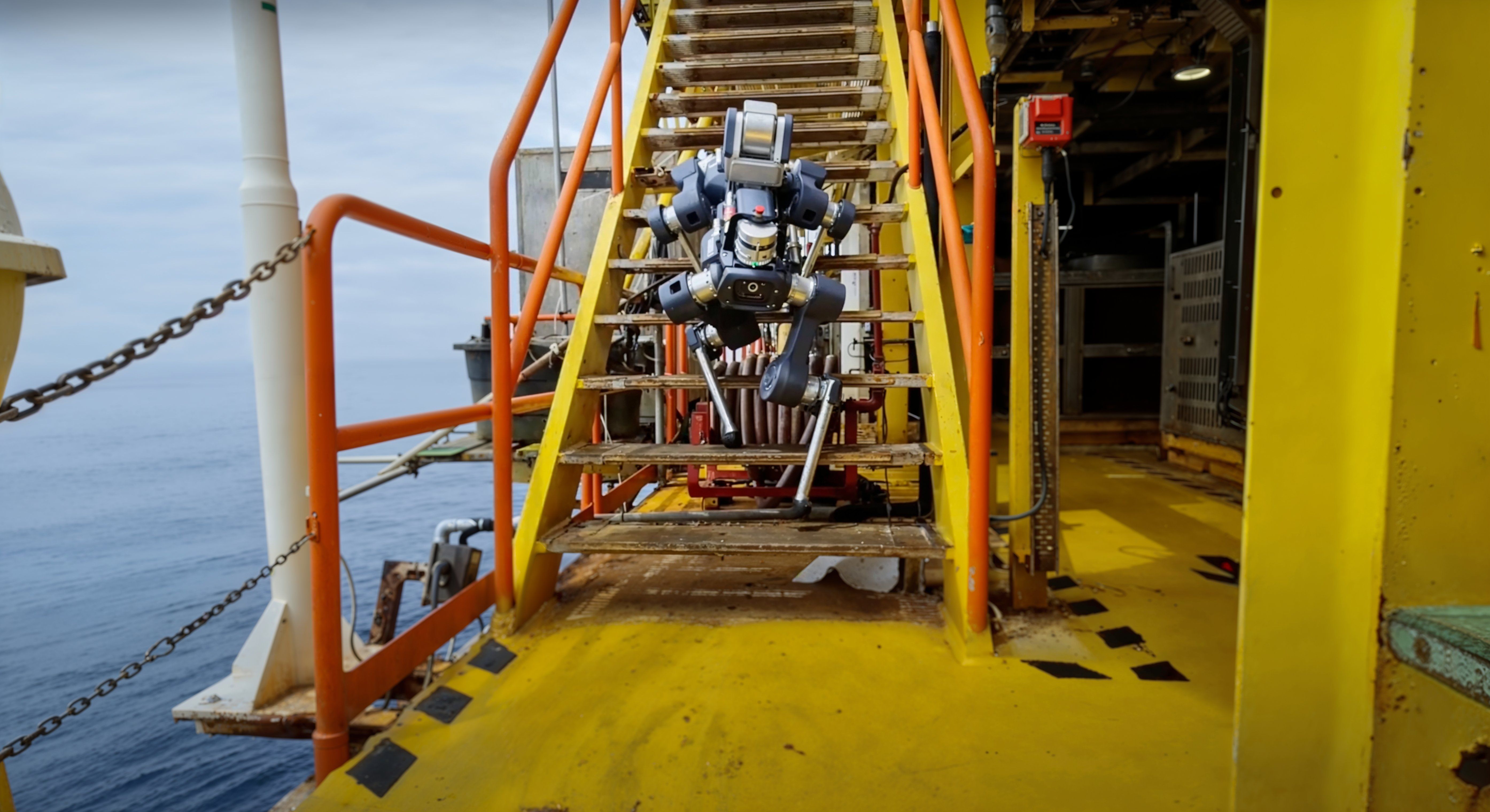
Изпълнението на дори относително прости задачи, като вземане и поставяне на автомобилна част, изисква от хуманоидния робот Atlas дълбоко разбиране на геометричните и семантичните характеристики на заобикалящите го обекти. Инженерите от Boston Dynamics разкриват как роботът "вижда" света благодарение на гъвкава и адаптивна система за възприятие.
Първо, Atlas трябва да открие и идентифицира обекта сред други блестящи или слабо контрастни части в завода. След това определя точното местоположение на частта, за да я хване – тя може да се намира на маса, в контейнер и т.н. Накрая, роботът решава къде и как да постави обекта с изключителна точност, за да избегне неправилно поставяне или изпускане.
Системата за възприятие на Atlas включва високоточни сензори, модерни AI алгоритми с машинно обучение и модул за оценка на собственото местоположение. Роботът използва компютърно зрение, за да открива и класифицира обектите, определя тяхното разположение спрямо останалите елементи в пространството и коригира действията си при нужда.
Ключова роля играят т.нар. "ключови точки" – външни, маркиращи обекти, които трябва да се заобикалят, и вътрешни, обозначаващи разпределението на рафтове, кутии и други елементи. Atlas използва невронна мрежа, за да прогнозира разположението на тези точки и да се ориентира в средата.
Преди да пристъпи към манипулации, роботът определя собственото си местоположение чрез модул за локализация, който анализира позицията и ориентацията на обектите наблизо. Допълнително се използва кинематична одометрия за проследяване на движението на робота.
Системата SuperTracker обединява данните от различни сензори – кинематика, компютърно зрение и др. – за да оцени позицията на захватите дори когато обектите не се виждат добре от камерите. При ограничена видимост или слабо осветление, тези оценки се проверяват допълнително.
Вижте още подобни статии
 Robo Challenge Burgas 2026: Бъдещите инженери превзеха Бургас с иновации
Robo Challenge Burgas 2026: Бъдещите инженери превзеха Бургас с иновации Разработчиците отказват да пишат код без ИИ, въпреки признаци за спад в продуктивността
Разработчиците отказват да пишат код без ИИ, въпреки признаци за спад в продуктивността Интерактивен миниград: Децата от ДГ „Яна Лъскова“ учат правилата за движение
Интерактивен миниград: Децата от ДГ „Яна Лъскова“ учат правилата за движение МВР създава карта на нелегалните гонки: Готвят строги мерки за шофьорите
МВР създава карта на нелегалните гонки: Готвят строги мерки за шофьорите
Инженерите подчертават, че точната калибровка на сензорите, системата за компютърно зрение и други компоненти е от решаващо значение за прецизната работа и автономност на Atlas. В бъдеще те планират да подобрят адаптивността на робота, като интегрират възприятието и действието в едно цяло.

Коментари (0)
Все още няма коментари.